Dense Depth Maps-based Human Pose Tracking and Recognition in Dynamic Scenes Using Ridge Data
Duration
[2012 – 2014], Designation = Research Associate
Supported by
This work was partially supported by the 2014 RD Program for S/W Computing Industrial Core Technology through the MSIP/KEIT (Project No. 14-824-09-005) and the Implementation of Technologies for Identification, Behavior, and Location of Human based on Sensor Network Fusion Program through the Ministry of Trade, Industry and Energy (Grant Number: 10041629).
Project Description
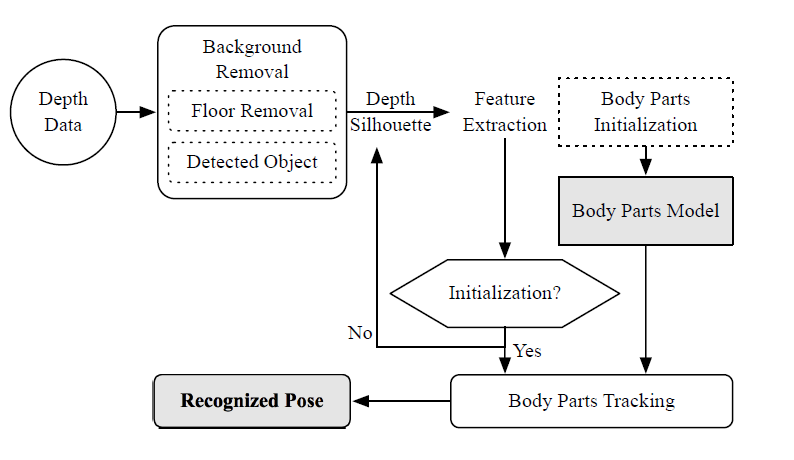
This paper addresses the problem of automatic detection, tracking and recognition of three-dimensional human poses from monocular depth video sequences for machine vision applications. In this paper, we present a real-time tracking system for body parts pose recognition utilizing ridge data of depth maps. At first, the depth maps are processed to extract features by considering ridge data surrounded by binary edges silhouettes acting as skeleton shape of human body. Then, the pose estimation is applied to initialize each body parts having joint points information using predefined pose. For body part tracking, all features (i.e., ridge data or depth values) are extracted according to a continuously updated torso-center, head and body part joint points. This help to provide the estimation of 3D body joint angles using the forward kinematic analysis. Our experimental results believe that the proposed method is reliable and efficient for tracking and recognizing the exact skeleton for even dynamic scenes and complex human pose.